
実環境ロボット情報学分野
ロボット・センサ情報処理技術による環境と人間の理解
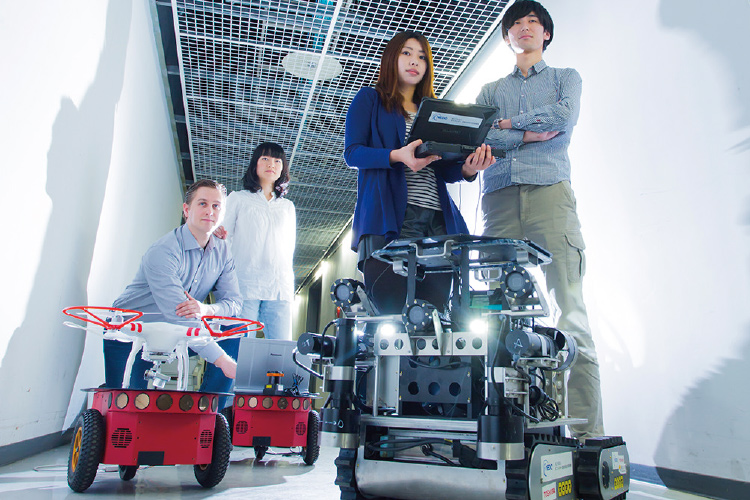
人間の目や耳などの感覚器の働きをコンピュータで実現する画像処理技術・センサ情報処理技術と、ロボットの知能である人工知能技術を活用して、実環境で活躍するロボットの実現を目指します。
教員紹介

- 山下 淳
- YAMASHITA Atsushi / 教授
実環境ロボット情報学分野では、人間の目や耳などの感覚器の働きをコンピュータで実現する画像処理技術・センサ情報処理技術と、ロボットの知能である人工知能技術を活用して、実環境で活躍するロボットの実現を目指します。環境情報の高度センシング技術や臨場感あふれる情報提示技術によって、人間やロボットが環境を理解し行動するための革新的技術を開拓しています。また、人間が環境を理解し行動するための原理を明らかにし、人間の行動を支援する機器開発とその情報処理技術の研究を行っています。
ロボット、ヒューマンインタフェース、人間・環境理解などをキーワードとして、基礎理論から実応用まで幅広く取り組んでいます。

- 安 琪
- AN Qi / 准教授
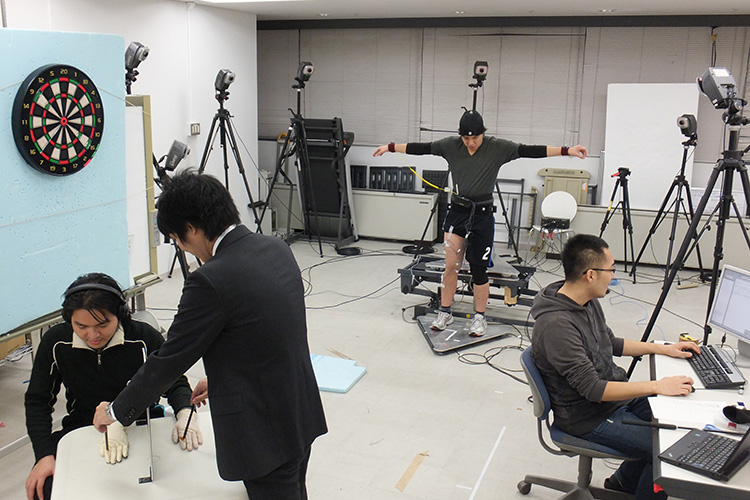
日本の高齢者人口は25%を超え、超高齢社会となっています。高齢になると運動疾患を生じることが増え、社会保障費の増大や介護者、理学療法士などの負担が増えています。本研究室は運動疾患を有する人を支援する技術や運動の教示システムの研究開発を目指しております。実際に運動支援やリハビリテーションをするためには、基礎研究としてヒトが運動を実現するメカニズムを理解し、それを支援システムに活用することが重要です。本研究室はヒトの運動メカニズムを解明する基礎研究から、支援技術の開発まで応用研究まで幅広く研究を行っております。

- 濵田 裕幸
- HAMADA Hiroyuki / 特任講師
人の脳は、多様な環境において、環境と身体の適応を可能にし、様々な動作を実現しています。そのため、脳に何らかの障害を有することで、環境との適応が困難となり、日常生活に影響が及びます。このようなリハビリテーションを必要とする方に対し、効果的な支援方法を提供するためには、神経科学や認知科学に基づき、人の適応メカニズムを深く理解することが必要です。私たちの研究室では、神経活動や認知特性の解明を通じて、人の適応のメカニズムを理解することを試みています。基礎研究から、神経疾患患者を対象とした臨床研究まで多岐に渡って研究を推進しています。
