アンビエント・メカトロニクス分野
人と環境の新たなインタラクションを創造する
環境調和性に優れたアクチュエータ・センサの実現と、人と外界のインタラクションの理解を通じて、人を自然に取り巻き支援するメカトロニクス環境の構築をめざしています。
教員紹介

- 山本 晃生
- YAMAMOTO Akio / 教授
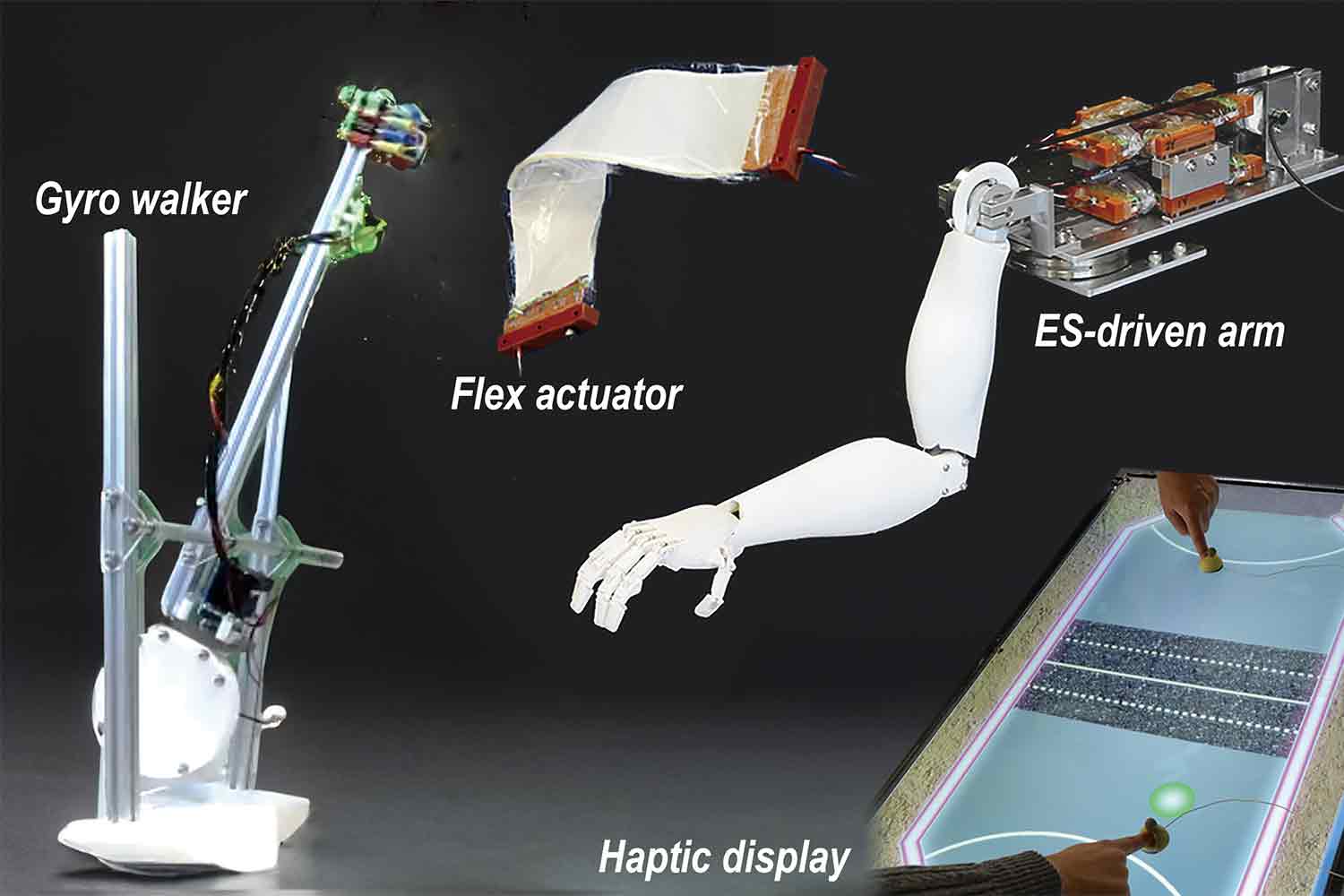
インタラクションやロボティクスなどの分野において、アクチュエータやセンサなどのメカトロニクス要素技術への要求はますます高まっています。例えば、高機能なロボット創出につながる高出力アクチュエータ、人とのインタラクションに適した柔軟・軽量なアクチュエータ・センサなど、従来技術の延長では必ずしも実現できない様々な要求があります。本研究室では、従来技術の延長に留まらない不連続な技術革新をめざして、自由な発想のもとで新しいアクチュエータ・センサ技術の探求を進めています。
また、それら要素デバイスの応用として、新しいヒューマンインタフェースやロボット機構の研究を行っています。例えば、遠隔地やVR環境内のものに触れた感触を提示するハプティックインタフェース、環境熱を利用して動作する熱駆動ロボットなどのテーマに取り組んでいます。